服務熱線:1362169548613621695486
服務熱線:1362169548613621695486
1 前言
近年來,低下的移動出行效率以及頻發的交通事 故已成為當前交通事業發展面臨的最艱巨的挑戰,高 度復雜的道路交通場景對智能駕駛汽車的安全性提 出了更高的要求,使車輛駕駛人員從駕駛和擁堵中解 放出來成為汽車行業需要面臨和解決的一個關鍵問 題。在工業4.0和第4次工業革命的大背景下,汽車經 過不斷發展,逐步進入電動化和智能化時代,汽車技 術呈現出了成熟的主動安全系統,輔助或代替了駕駛 員的一部分工作。尤其隨著人工智能(AI)技術及相 關算法的不斷成熟,智能駕駛乃至無人駕駛逐步成為 可能,伴隨著對汽車安全及運行效率要求的不斷提 高,許多傳統的整車企業紛紛制定智能化發展路線和 戰略,相關技術及產業領域的市場前景巨大 。車輛 智能駕駛功能即以車載傳感器信號為基礎,進行感 知、決策、執行控制等過程,實現車輛對于周圍環境的 判斷和輔助功能,可以說智能駕駛汽車及
2 智能網聯車輛測試分析
當前,智能駕駛等級標準劃分仍然遵循國際通用 標準,依據不同車輛和駕駛員在車輛控制方面的作用 和職責,在決策控制方面可以區分為“輔助控制類”和 “自動控制類”,分別對應不同等級的決策控制 。其 中,輔助控制類主要指車輛利用各類電子技術輔助駕 駛員進行車輛控制,如橫向控制、縱向控制及其組合 模式,可分為駕駛輔助(DA,L1 級)和部分智能駕駛 (PA,L2級);自動控制類則根據車輛自主控制以及替 代人員進行駕駛的場景和條件進一步細分為有條件 智能駕駛(CA,L3級)、高度智能駕駛(HA,L4級)和完 全智能駕駛(即無人駕駛FA,L5級) 。 智能汽車ADAS系統需求旺盛,作為其關鍵技術 的感知傳感器,其功能、性能及成本會直接影響ADAS 發展。自車感知性能指的就是通過各類傳感器獲取 周圍環境信息的能力,當前ADAS測試系統常用的物 理傳感器包括超聲波雷達、激光雷達、毫米波雷達、單 機/立體攝像頭、高精度數字定位地圖等。上述各種傳 感器的優缺點如下方的表1所示。 車載攝像頭與消費電子攝像頭結構類似,是將鏡 頭組、CMOS 芯片封裝為模組,并和數字信號處理器 (Digital Signal Processor,DSP)集成,其應用場景較多, 可以實現先進行車輔助(行車記錄儀、ADAS)、駐車輔 助(全車環視)與車內人員監控(人臉識別技術)等功 能。單目攝像頭一般安裝在前擋風玻璃上部,用于探 測前方路況,識別周邊車輛、行人等信息,廣泛應用于 前碰撞預警、行人監測、車道偏離預警等功能中,由于其成本低廉,技術成熟,目前被廣泛搭載于智能車輛 上,仍然是當前和未來市場的應用主流。
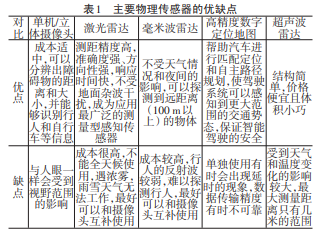
毫米波雷達原理是向周圍發射無線電,通過測定 和分析反射波以計算障礙物的距離和方向。無線電 的波長范圍在 1~10 mm,頻率范圍在 30~300 GHz, 當下主流的車載毫米波雷達有 24 GHz 和 77 GHz 兩 個頻段,24 GHz 多用于短/中距離測量,77 GHz 用于 中/長距離測量,由于 77 GHz 毫米波雷達性能優于 24 GHz,故未來前者將是主流的應用頻段。
3 智能網聯車輛技術架構與路線分析
智能網聯車輛的測 試主要包括安全性測試和一般專項性能測試兩方面, 昆山舒美認為,安全性測試包括針對功能安全性和信息安全性 的測試,且二者均需要進行硬件在環測試,即對智能 網聯汽車系統及零部件的測試,可以說,功能安全和信息安全是智能網聯汽車安全問題的核心技術難點, 直接影響著智能網聯汽車的未來市場前景和發展。 智能網聯車輛可以自主操縱油門和制動、方向(轉向) 及擋位等信息,并且可以實時監測車輛行駛的數據狀 態,操作方便也更加精確,汽車智能化技術的進步必 然會讓交通事故死亡率得到顯著下降。智能駕駛汽 車具有自身的特點,主要表現為其對環境更為敏感, 對周圍物理狀態的把握相比較駕駛人員更準確,但是 智能網聯汽車車輛還缺乏像人類駕駛員一樣的靈活 應變能力 。